水中清掃ロボット <配水池、浄水池内清掃・調査>
「綺麗な水」を通じて社会に貢献する
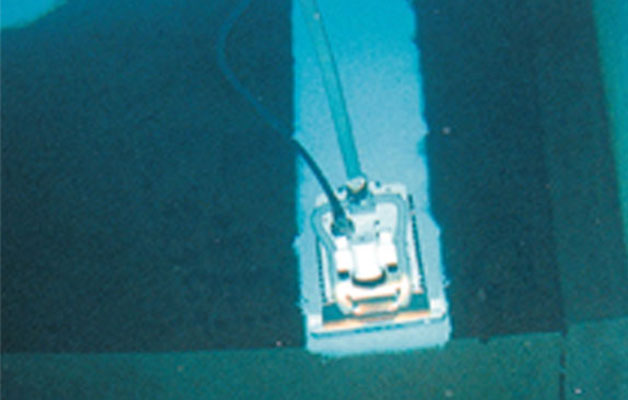
配水池や浄水池の内部調査及び底部清掃を行うには、水を抜くか、潜水士による作業しかありませんでした。水を抜く事は、貴重な水道水の無駄と水槽内の危険な作業(酸欠等)を伴います。又、潜水士による作業は、水道水の中に人間が入り、作業を行う為に衛生面と危険性が伴います。当社では、危険性を排除するために、清掃作業をロボット施工で行い、安全に取組んでいます。
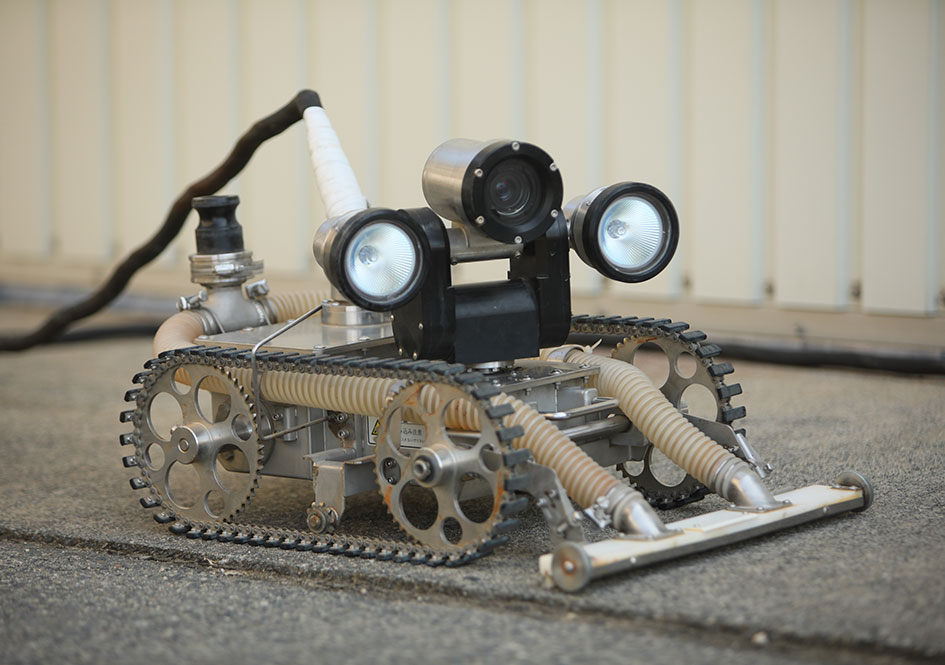
清掃ロボット仕様を見る
| 電 源 | 一次側 AC100v 50/60Hz |
|---|---|
| 水中ロボット電圧 | DC12V |
| 駆動方式 | ゴムクローラとモータ駆動 |
| 制御方法 | 有線式 手動操作(無線リモコン) |
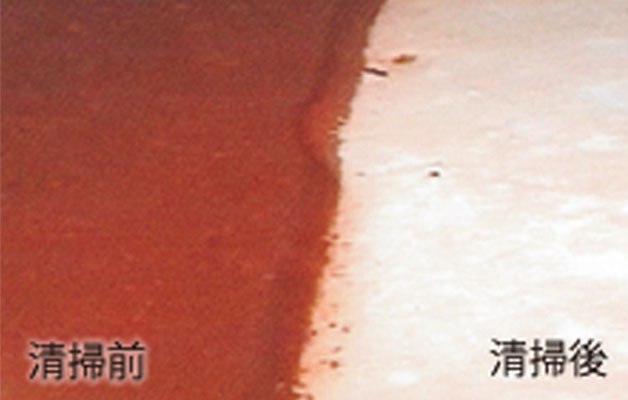
| 清掃方法 | ブラシ付吸入口による吸引排出 |
| 走行パターン | 手動式任意走行 |
| 外形寸法 | 全長450mm×全幅434mm×全高357mm |
| 重 量 | 気中 20kg 水中 11kg |
| 吸込み幅 | 400mm |
| 走行速度 | 地上より可変可能 Max100mm/秒 |
| 連続運転時間 | 10時間 |
| 耐水深 | 30m |
|---|---|
| 吸入ホース | 特殊フロートホース 38A |
| 特殊フロートケーブル | 外形19.8mm 長さ100m(2本継ぎ) |
| CCDカメラ | SONY EVI-370 防水仕様 |
| チルト動作角度 | 上向 55度 下向 35度 |
| ズーム | 12倍 |
| ハロゲンランプ | 50w×2個(100w) 照度調整付 |
| メタルハライドランプ | 20w×2個(40w) |
| 法面吸引付 | 登坂能力 30度 |
| 無線到達距離 | 10m(微弱電波利用 150.025MHz) |